聚类分析
机器学习—聚类篇
1.聚类算法的概述:
聚类试图 将数据集中的样本划分为若干个通常是不相交的子集,每个子集对聚类算法而言,样本簇亦称”类”称为一个”簇” (cluster). 通过这样的划分,每个簇可能对应于一些潜在的概念(类别) ,
聚类既能作为一个单独过程,用于找寻数据内在的分布结构,也可作为分类等其他学习任务的前驱过程.例如,在一些商业应用中需对新用户的类型进行判别, {且定义”用户类型”对商家来说却可能不太容易,此时往往可先对用户数据进行聚类,根据聚类结果将每个簇定义为一个类,然后再基于这些类训练分类模型,用于判别新用户的类型.
训练的目标:
1.簇间的距离较大,簇内的距离较小
2.指标和距离公式的选择
性能指标:簇内的相似度 和 簇间的相似度

3.常见聚类算法
3.1聚类算法类别
| 类别 | 典型算法 | 算法的基本策略 |
|---|---|---|
| Partitioning approach | K-means,k-medoids,CLARANS,PAM | Construct various partitions and then evaluate them by come criterion |
| Hierarchical (层次) approach | Diana,Agnes,BIRCH,ROCK,CAMELEON | create a hierarchical decomposition of the set of data(or object) using some criterion |
| Density-based approach | DBSACN,OPTICS, DenClue | based on connectivity and density functions |
| Grid-based approach | STING,WaveCluster,CLQUE | based multiple-level granularity (多层次粒度)structure |
| Model-based | EM,SOM,COBWEB | A model is hypothesized for each of the clusters and tries to find the best fit of that model to each other |
| Frequent pattern-based | pCluster | based on the analysis of frequent patterns |
| used-guided or constraint-based | COD(obstacles),constrained clustering | cluster by considering user-specified or application-specifier constraints |
4. Partition Algorithm
4.1 k-means
4.1.1算法的基本步骤:
1 | 1.创建k个点作为初始质点(经常是随机选取) |
目标函数 : 假设是数据点,
是初始化的数据中心
$min\sum_{i=1}^n min ||x_i -\mu_j||^2$
这个函数是非凸优化函数,会收敛于局部最优解
函数的曲线如下:[以k=2为例]
4.1.2算法的基本评价
时间复杂度: $O(tkn)$ :t :迭代的次数,k表示类别的个数,n表示样本的数量
相比较 RAM :$O(k(n-k)^2)$ CLARA: $O(ks^2 +k(n-k)$
算法的复杂度比较低,不过很可能得到的是局部最优解(可以通过,模拟退火和 遗传算法 得到最优解)
缺点: 1. 只能适用于 中心值有意义的数据,不适用于categorical data
2.需要提前确定k值
3.因为会出现进入局部最优解的现象,所以会对噪音点,以及最初中心点的设置会很敏感
4. Not suitable to discover clusters with non-convex shapes
4.1.3对于K-means 算法的改进
1 | 可以用 modes来代替均值,用其他方法取确定质点 |
4.2 K-Medoids
Find representative object,called medoids ,in clusters
4.2.1 PAM
PAM(Partitioning Around Medoids,1987)是作为K-medoids的基础算法,基本流程:
首先随机选择k个对象作为中心
把每个对象分配给离它最近的中心,然后随机地选择一个非中心交替替换中心对象
计算分配后的距离改进量,进而得到改进的cost ,如果cost<0,即结果有改进,则进行交换
直到目标函数不再有改进为止
算法复杂度比较高,只适用于小数据集
4.2.2 CLARA
它从数据集中抽取多个样本集, 对每个样本集使用PAM, 并以最好的聚类作为输出
CLARA 算法的步骤:
(1) for i = 1 to v (选样的次数) ,重复执行下列步骤( (2) ~ (4) ) :
(2) 随机地从整个数据库中抽取一个N(例如:(40 + 2 k))个对象的样本,调用PAM方法从样本中找出样本的k个最优的中心点。
(3)对于每个点,把它归类到距离它最近的点的簇
(4) 计算上一步中得到的聚类的总代价. 若该值小于当前的最小值,用该值替换当前的最小值,保留在这次选样中得到的k个代表对象作为到目前为止得到的最好的代表对象的集合.
(5) 返回到步骤(1) ,开始下一个循环.
算法结束后,输出最好的聚类结果
优点:
可以处理的数据集比 PAM大
缺点:
1有效性依赖于样本集的大小
2 基于样本的好的聚类并不一定是整个数据集的好的聚类, 样本可能发生倾斜
例如, Oi是整个数据集上最佳的k个中心点之一, 但它不包含在样本中, CLARA将找不到最佳聚类
4.2.3 CLARANS
focusing+spatial data structure
5.层次化聚类方法
一般来说分为两类:
- Agglomerative 层次聚类:又称自底向上(bottom-up)的层次聚类,每一个对象最开始都是一个
cluster,每次按一定的准则将最相近的两个cluster合并生成一个新的cluster,如此往复,直至最终所有的对象都属于一个cluster。这里主要关注此类算法。 - Divisive 层次聚类: 又称自顶向下(top-down)的层次聚类,最开始所有的对象均属于一个
cluster,每次按一定的准则将某个cluster划分为多个cluster,如此往复,直至每个对象均是一个cluster。
优点:1 .不需要提前确定k,但是需要一个停止条件
2.可以用树状结构来反映训练的过程,并且得到不同k情况下
的划分方案
缺点: 1
主要思想:
每次找到距离最近的两个点作为一个簇
2. 把同一个簇的所有点看作一个点 3. 重复上述操作.....直到达到停止条件
5.1 AGNES(Agglomerative Nesting)
sklearn 源码:
1 | class sklearn.cluster.AgglomerativeClustering(n_clusters=2, affinity=’euclidean’, memory=None, connectivity=None, compute_full_tree=’auto’, linkage=’ward’, pooling_func=<function mean>) |
算法的主要过程:
single linkage: 适用两个簇之间 距离最小的一对点的距离作为簇之间的

可以看到,该 算法的时间复杂度为 (由于每次合并两个
cluster 时都要遍历大小为 的距离矩阵来搜索最小距离,而这样的操作需要进行
次),空间复杂度为
(由于要存储距离矩阵)
5.2 DIANA
是AGNES算法的反过程,最后结果是每个样本都是属于一类
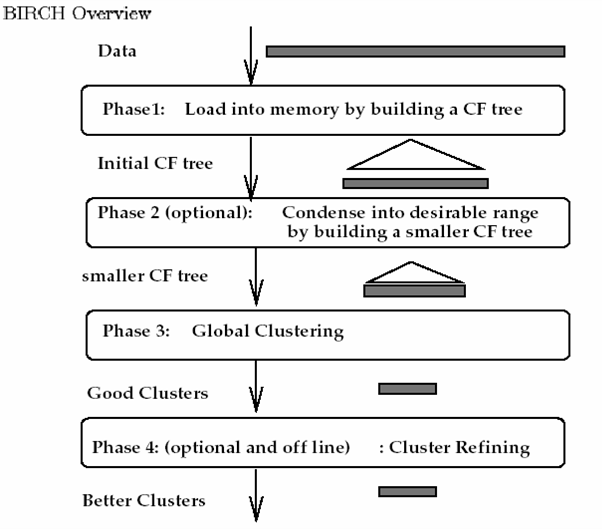
5.3 BIRCH
链接:https://www.cnblogs.com/pinard/p/6179132.html
链接:https://zhuanlan.zhihu.com/p/22458092
5.3.1 CF Tree动态建立的过程:
基本概念:
CF(Clustering Feature):类簇总体信息三元组,其中
是一个类簇中数据点个数,
是类簇中所有数据点的加和值,即
,
是类簇中所有数据点的平方和
,CF相当于对一个类簇的信息做了总结。
性质:
CF可加性定理:
针对两个不相交的类簇,其CF向量分别为,
,那么这两个不相交类簇合并后的CF向量为:
。这里的证明比较简单,就略去了。
在BRICH中,针对一个类簇,通常只保留其CF向量信息,这样做比较节省空间且高效,后续的聚类需要的计算只需要根据类簇的CF向量即可完成。
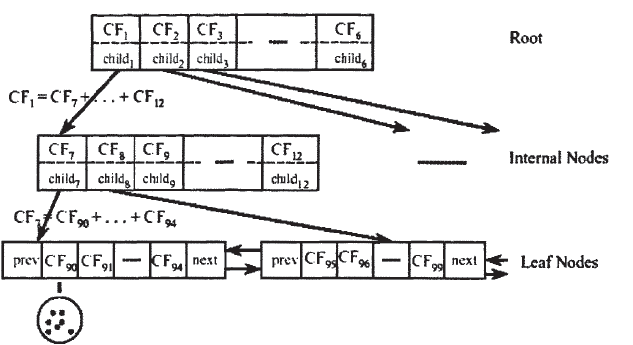
CF Tree:类似于B树的一颗高度平衡树,有三个参数:内部节点平衡因子B,叶节点平衡因子L,簇半径T。每个非叶子节点至多包含B个项,形式为,其中
是指向第i个子节点的指针。每个叶子节点至多包含L个项,且包含指向前后叶子节点的指针prev和next,其中的每一项代表一个类簇,且满足类簇直径小于T。树的结构如下图:
CF Tree会随着新的数据点的加入而动态的建立起来,其插入过程包含以下几步:
(1)从根节点开始,递归向下选择最近的孩子节点,这里最近的度量是根据前面提到的中任意一个确定;
(2)如果在(1)中找到了最近的叶子节点中的一个,检查其中最近的CF元组能否不超过阈值T吸收此数据点,若能,更新CF值;若不能,是否有空间(这里每个节点能分配的空间有限,可参见下面的参数表)添加新的元组,若能则添加新的元组,若不能,分裂距离最远的一对元组到两个叶子节点,作为初始的种子,将其他元组按距离最近原则重新分配到两个新的叶子节点上。
(3)从叶子节点向上回溯修改每个非叶子节点的CF值,若叶子节点发生分裂,则在父节点中增加相应的CF元组,同样,父节点也可能需要分裂,则持续分裂直至根节点,最终如果根节点发生分类,则树的高度需要加1。
算法的流程:
5.3.3算法评价
优点:
1.节省内存 2.速度快 4可以识别噪音点
缺点:
1.结果依赖于数据点的插入顺序
2.对于非球状的簇聚类效果非常不好
3.对于高维数据簇类效果不好
4.局部性可能会导致聚类效果不佳
5.4 ROCK
相似度的计算:jaccard系数,余弦相似度
Jaccard 系数 定义为A与B交集的大小与A与B并集的大小的比值,值越大,相似度越高。

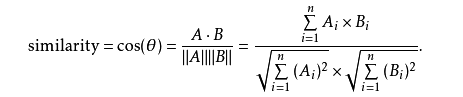
余弦相似度,是通过计算两个向量的夹角余弦值来评估他们的相似度。
值越接近1,就说明夹角角度越接近0°,也就是两个向量越相似,就叫做余弦相似
适用于类别型数据,核心思想是利用链接作为相似性的度量,而不仅仅是依赖于距离
clustering categorical data by neighbor and link analysis
5.5 CHAMELEON
https://zhuanlan.zhihu.com/p/55896918
6. 基于密度的聚类算法
“密度聚类” 基于密度的聚类(density-based clustering),此类算法假设聚类结构能通过样本分布的紧密程度确定.通常情况下,从样本密度的角度来考察样本之间的可连接性,并基于可连接样本不断扩展聚类簇以获得最后的聚类结果
主要特点: 1. 可以处理任何形状的cluster
2.可以处理噪音
3.一次扫描
4.需要设置密度参数,作为终止条件
6.1 DBSCAN
参考链接:https://www.cnblogs.com/pinard/p/6208966.html
机器学习–周志华
==一般建议:当数据比较稠密时,而且数据集不是凸的,那么用DBSCAN 会比 K-means聚类效果很好,如果聚类效果不是很好时,不建议用DBSCAN==
6.1.1算法介绍
是基于一组”邻域”(neighborhood) 参数($\epsilon $ ,$MinPts$)来刻画样本分类的紧密程度,
$\epsilon$ 表示了 域的半径长度
$MinPts$ :成为核心点的最低密度标准
定义: 给定的数据集$D = { x_1,x_2…x_m }$
所以想要找到满足连接性和最大性的簇的方法就是:如果 $x$ 为核心对象,由 $x$密度可达的所有样本组成的集合$X = { x^{‘} \in D | x_{‘}由x密度可达 }$ 即为满足要求的簇
6.1.2算法的主要流程
I:寻找样本集中所有的核心对象
II:形成 满足连接性和最大性的所有核心对象
6.1.3算法小结
DBSCAN的主要优点有:
1) 可以对任意形状的稠密数据集进行聚类,相对的,K-Means之类的聚类算法一般只适用于凸数据集。
2) 可以在聚类的同时发现异常点,对数据集中的异常点不敏感。
3) 聚类结果没有偏倚,相对的,K-Means之类的聚类算法初始值对聚类结果有很大影响。
DBSCAN的主要缺点有:
1)如果样本集的密度不均匀、聚类间距差相差很大时,聚类质量较差,这时用DBSCAN聚类一般不适合。
2) 如果样本集较大时,聚类收敛时间较长,此时可以对搜索最近邻时建立的$KD$树或者球树进行规模限制来改进。
3) 调参相对于传统的K-Means之类的聚类算法稍复杂,主要需要对距离阈值ϵϵ,邻域样本数阈值$MinPts$联合调参,不同的参数组合对最后的聚类效果有较大影响。
6.2 OPTICS
该算法是DBSCAN算法的改进(相关概念延续上面)
6.2.1 定义
说明:如果当x为核心点时,
$$rd(y,x) =\begin{cases} d(x,y) \qquad 当y不是x邻域中的点\ cd(x) \qquad 当y是邻域中的点时,为x的核心距离 \end{cases}$$
https://blog.csdn.net/LoveCarpenter/article/details/85049135
6.3 DENCLUE
6.4 CLIQUE
7.网格聚类法
STING (a STatistical INformation Grid approach) by Wang, Yang
and Muntz (1997)WaveCluster by Sheikholeslami, Chatterjee, and Zhang (VLDB’98)
A multi-resolution clustering approach using wavelet method
CLIQUE: Agrawal, et al. (SIGMOD’98)On high-dimensional data (thus put in the section of clustering high-dimensional data