Faster R-CNN 论文笔记
Faster R-CNN
主要参考博文
在原论文的摘要中提出:
在之前SPP-Net 和Fast R-CNN提出依靠region proposal algorithms去预测物体的位置会减少很多计算量,但是这也暴露了区域提议计算的瓶颈
本文关键提出了RPN(region proposal network),使用卷积层,减少参数的数量,有较快的速度和较高的准确率
RPN ==shares full-image convolutional features== with the detection network, thus enabling nearly ==cost-free== region proposals.
An RPN is a fully-convolutional network that simultaneously ==predicts object bounds and objectness scores== at each position. RPNs are trained end-to-end to generate highquality region proposals, which are used by Fast R-CNN for detection.
softmax交叉熵损失函数:https://blog.csdn.net/chaipp0607/article/details/73392175
网络框架
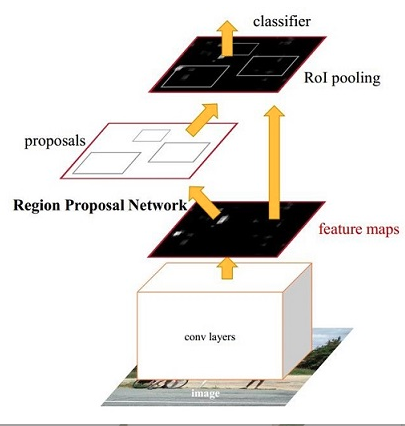
主要分为四部分:
Conv layers: 作为一种CNN网络目标检测方法,使用conv+pooling+relu来提取feature maps,被之后的RPN 和全连接层共享
RPN(region proposal network )
==用于生成region proposals==,该层主要工作:
a. 通过softmax判断anchors属于positive , negative,
b. 再利用bounding box regression 修正anchors获得较为准确的 proposals
roi pooling
该层收集输入的feature maps和proposals,综合这些信息提区proposal feature maps,
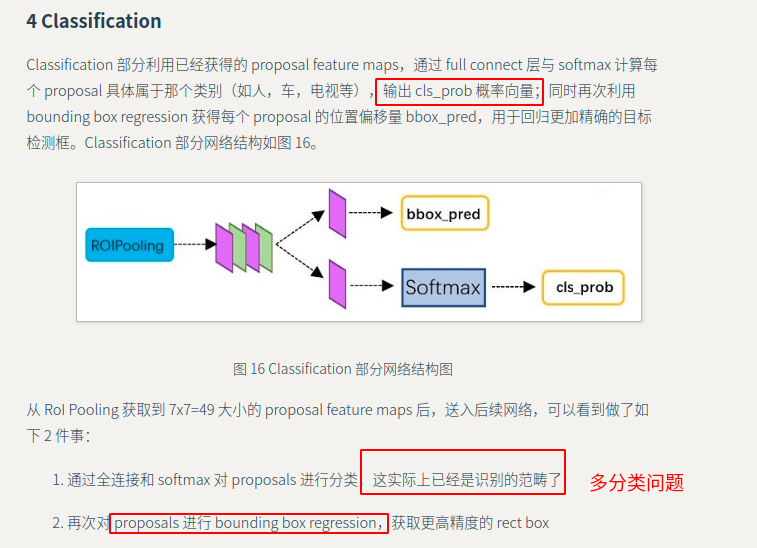
classification
利用 proposal feature maps 计算 proposal 的类别,同时再次 bounding box regression 获得检测框最终的精确位置
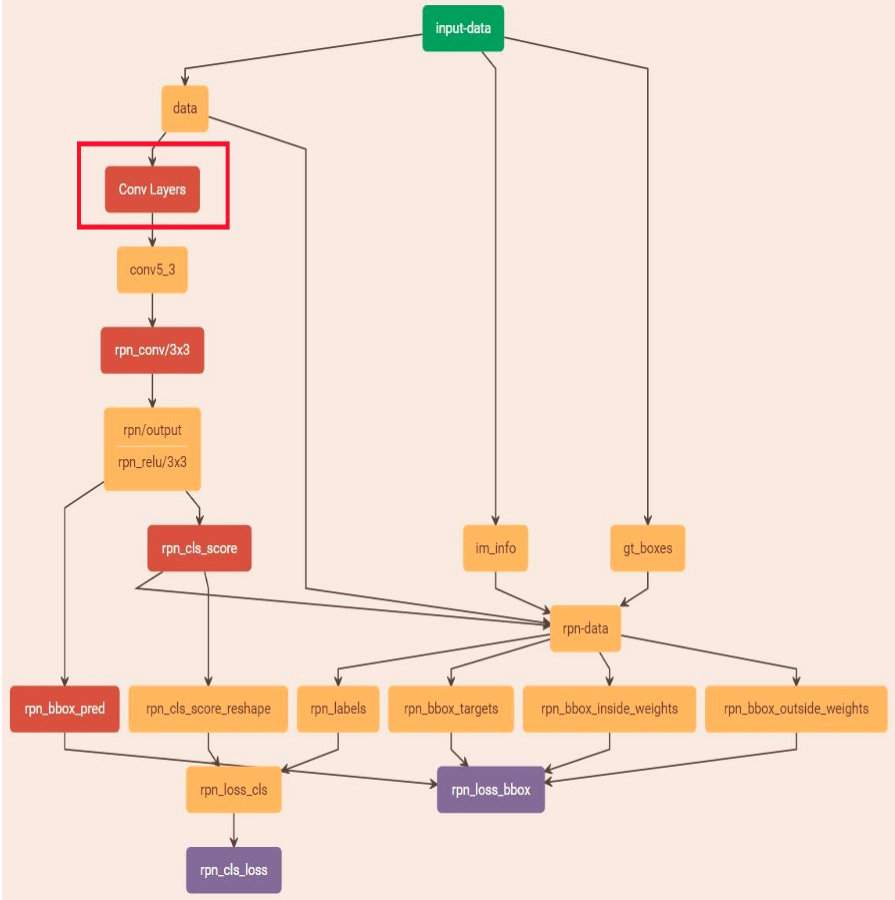
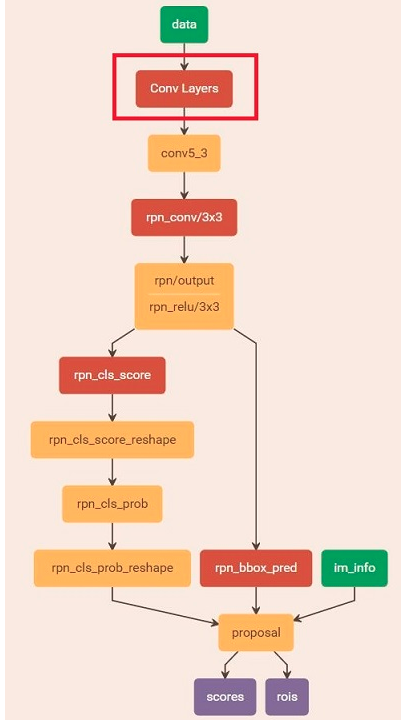
下图为python的VGG16模型中的faster_rcnn_test.pt网络结构
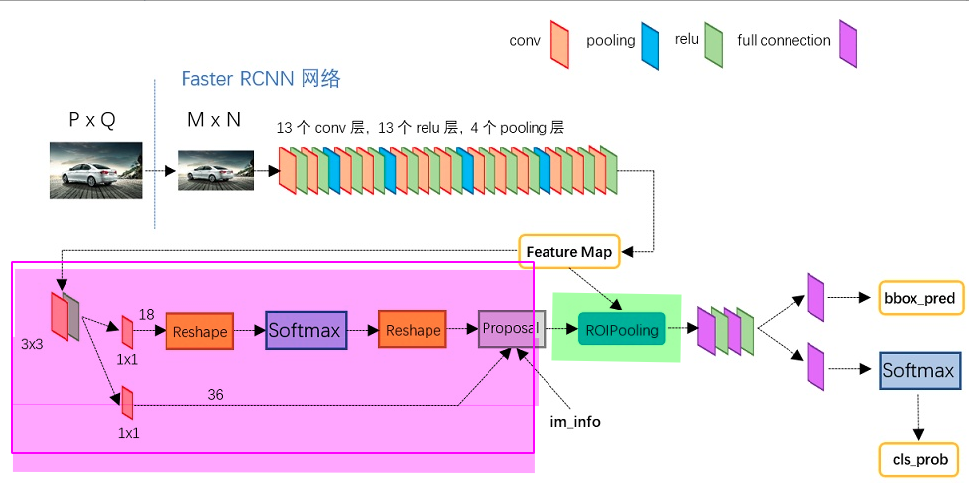
Conv layers
在Conv layers中
- 所有的conv层都是 kernel_size = 3, pad =1 ,stride =1
- 所有的pooling层都是 kernel_size =2, pad =0, stride =2
导致 Conv layers中conv层不改变输入输出矩阵的大小,只有在pooling层中M×N的矩阵变成(M/2)×(N/2)的大小。所以从Conv layers输出的矩阵的尺寸为M×N
目的是为了在ROI Pooling的输入层中proposal(M×N)与 feature maps尺寸一致
Region Proposal Network
这一层的主要任务: 获取有效的proposals,完成目标定位
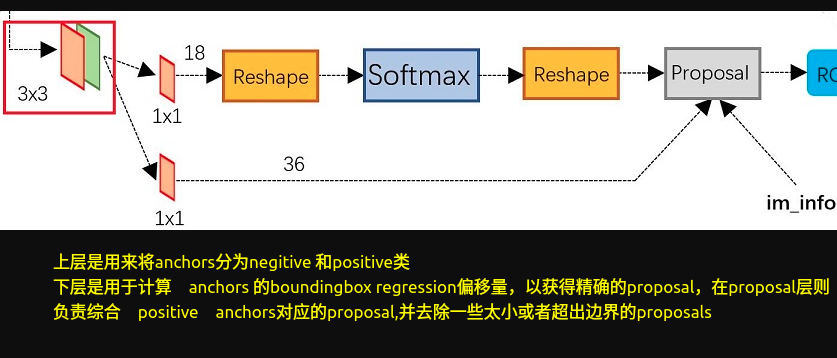
主要流程:生成 anchors -> softmax 分类器提取 positvie anchors -> bbox reg 回归 positive anchors -> Proposal Layer 生成 proposals
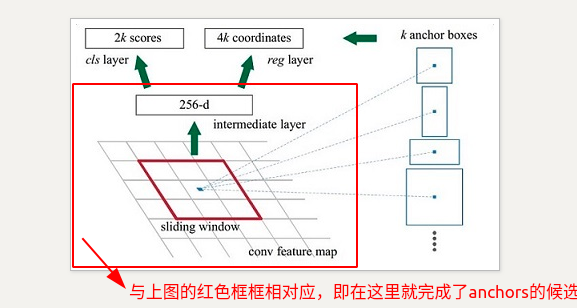
这是主要的原理就是:利用3×3的卷积核的中心作为anchor的中心,在每个点设置9个anchor作为候选区,之后再有cnn来判断anchor是negitive or positive anchor,目前这里只是二分类,而且后面还有 2 次 bounding box regression 可以修正检测框位置
1.生成anchors
略(思路是比较简单的,可以参考博客)
2.softmax分类器提取positive anchors
输入:anchors,输出:rpn_cls_score
3.bbox 回归
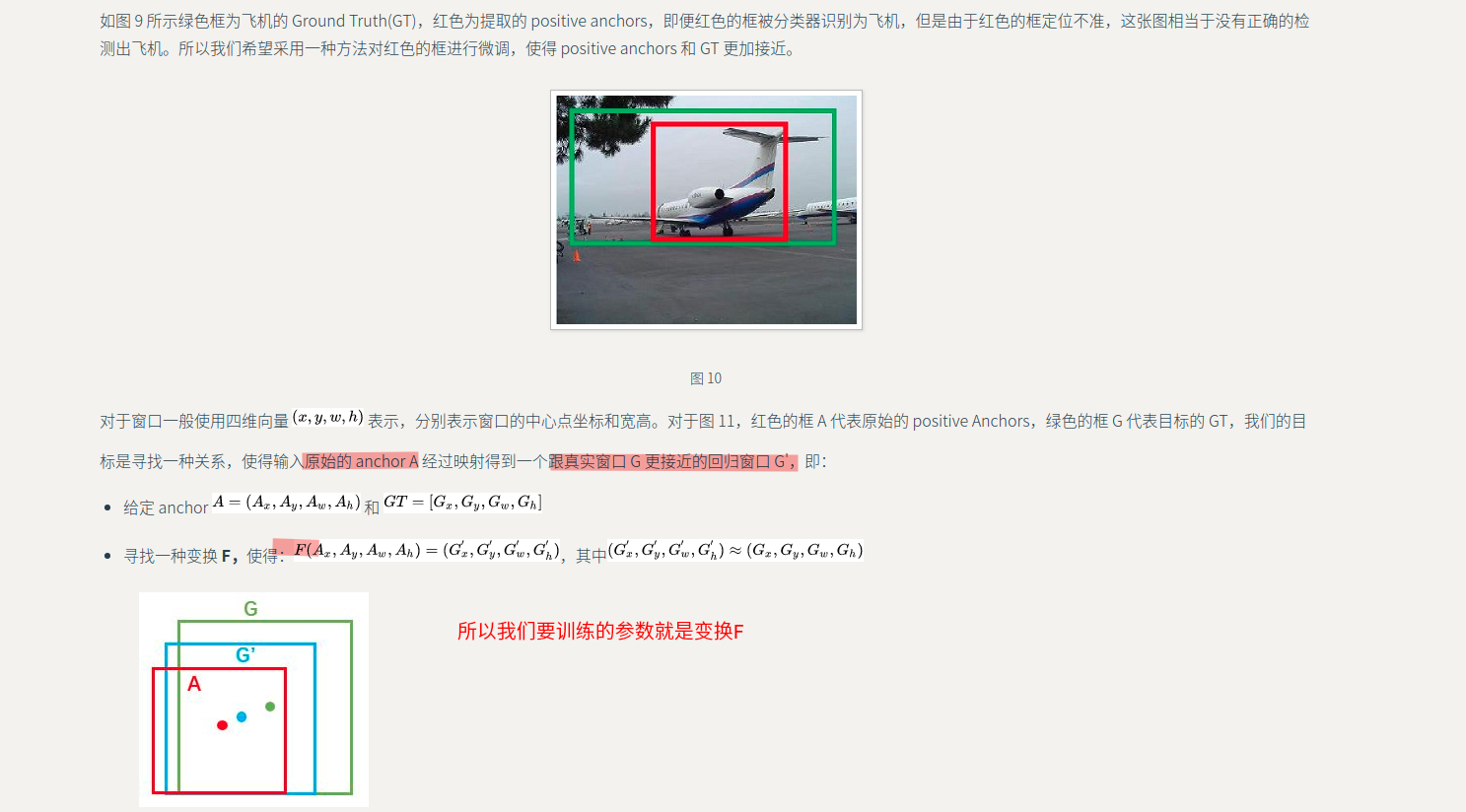
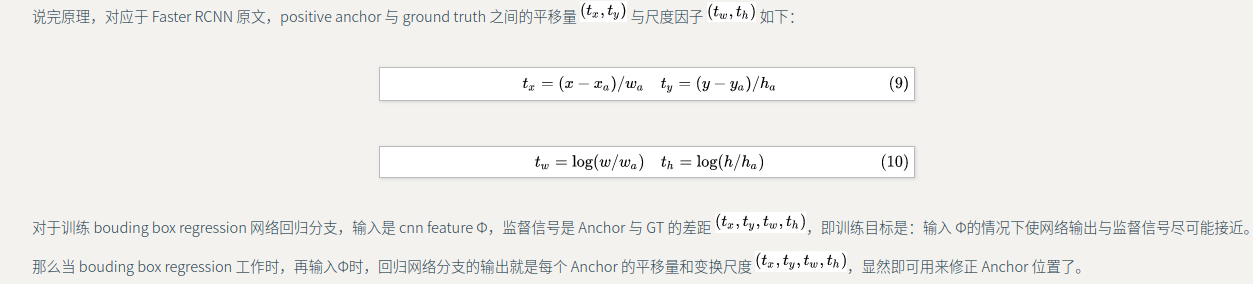
bounding box regression原理
大致思想:我们目标是像通过 bounding box regression,对anchors进行调整,让他接近GT(但是我们anchor的选取按照固定的方法,没有结合GT的位置信息);所以我们学习的是anchors和GT之间变换(每张图片的GT是固定的,而且anchors的选取也是固定的)
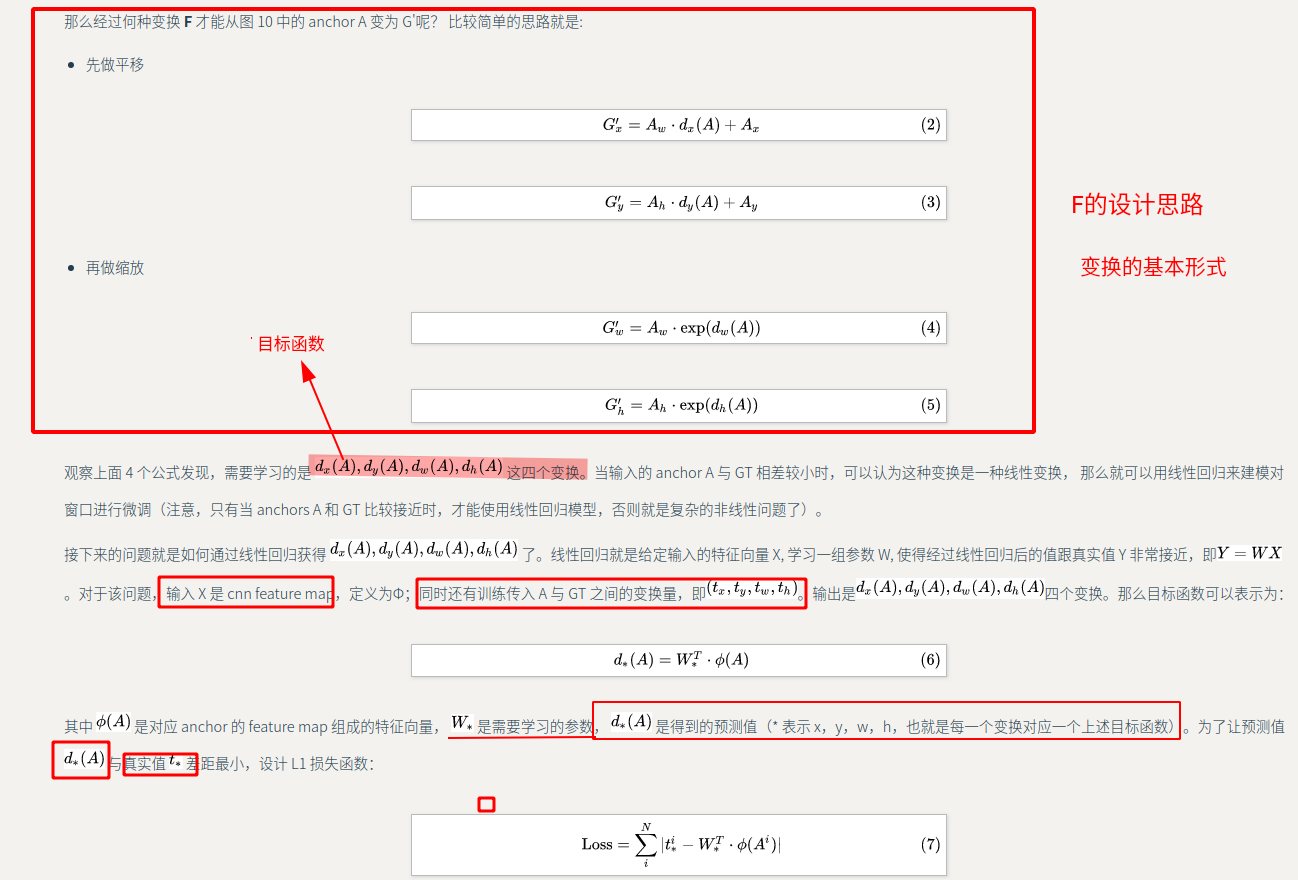
所以本文学习的是预测的窗口(anchor)=>GT窗口之间的一种变换(先平移后进行缩放)(如果相差比较小,即positive可以看作是线性回归模型)
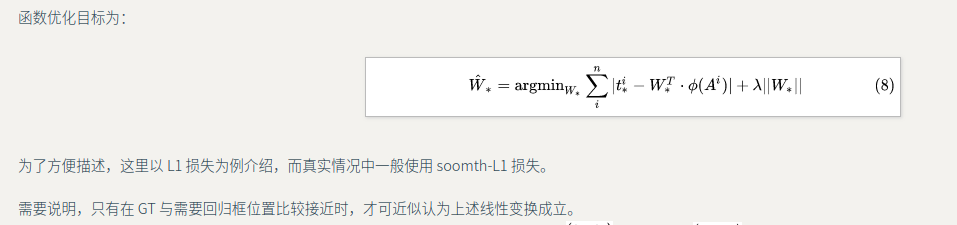
并设计相应的loss函数对其进行约束
原理
而在原论文中是这样子记录的
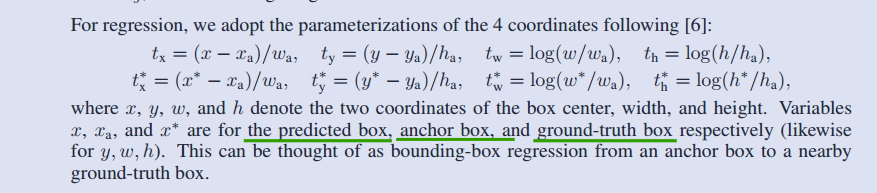

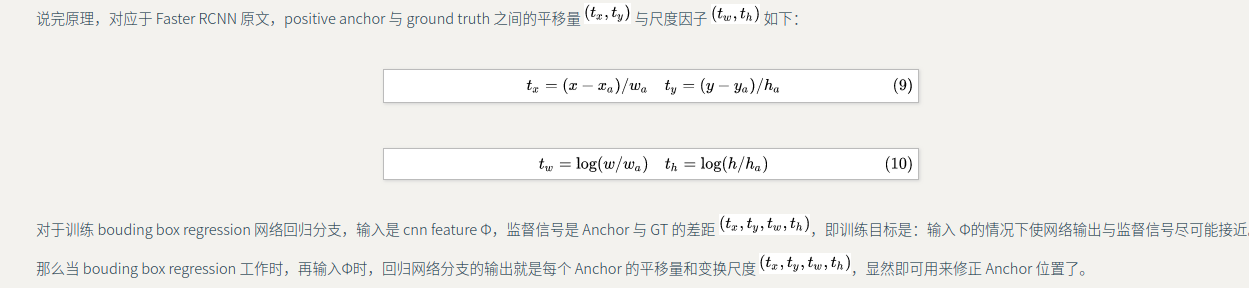
==在bbox-regression 中要训练的参数就是,我们需要预测的box(x,y,w,h)==
的4. proposal layer 生成 proposals
1 | 根据bbox回归得到的[dx(A), dy(A), dw(A) ,dh(A)]对所有的anchors进行修正和微调 |
注意由于第三步生成的proposal要和原图像进行对比,所以它的尺寸是M*N
NMS:非极大值抑制
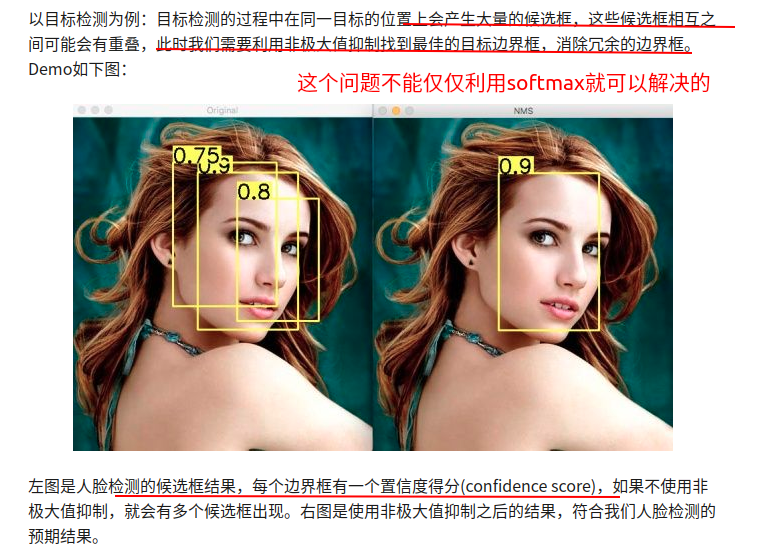
消除冗余的边界框
1 | 根据置信度得分进行排序 |
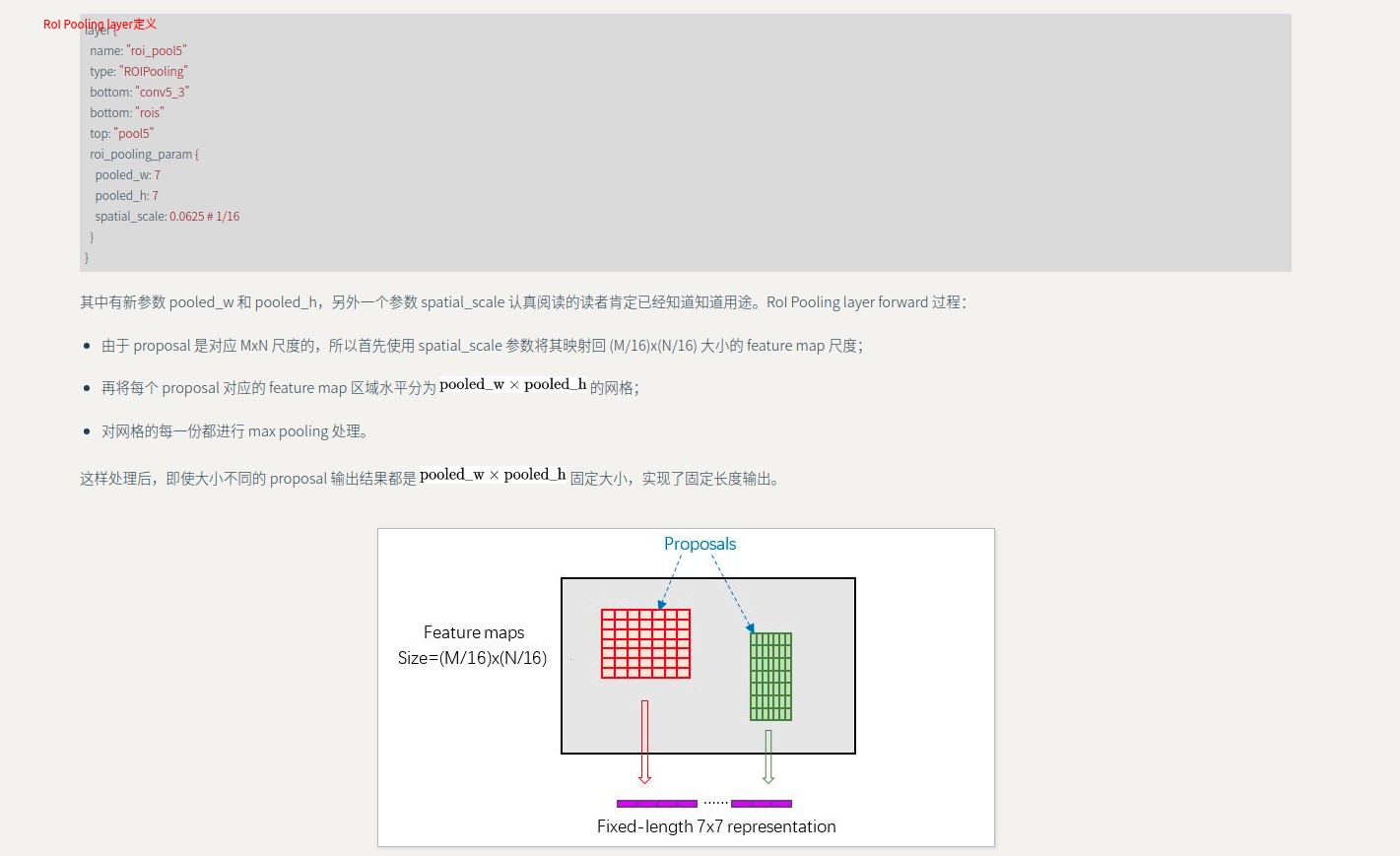
RoI Pooling
是一个简单的SPP-Net, 属于卷积层和连接层之间的过渡层,将大小不一的proposals变成固定大小(之后classifier 模块是利用全连接层进行分类,所以需要固定大小)
存在其他方法:crop,warp,但是他们会破坏图像原有信息
Classification
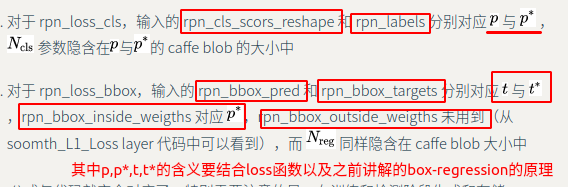
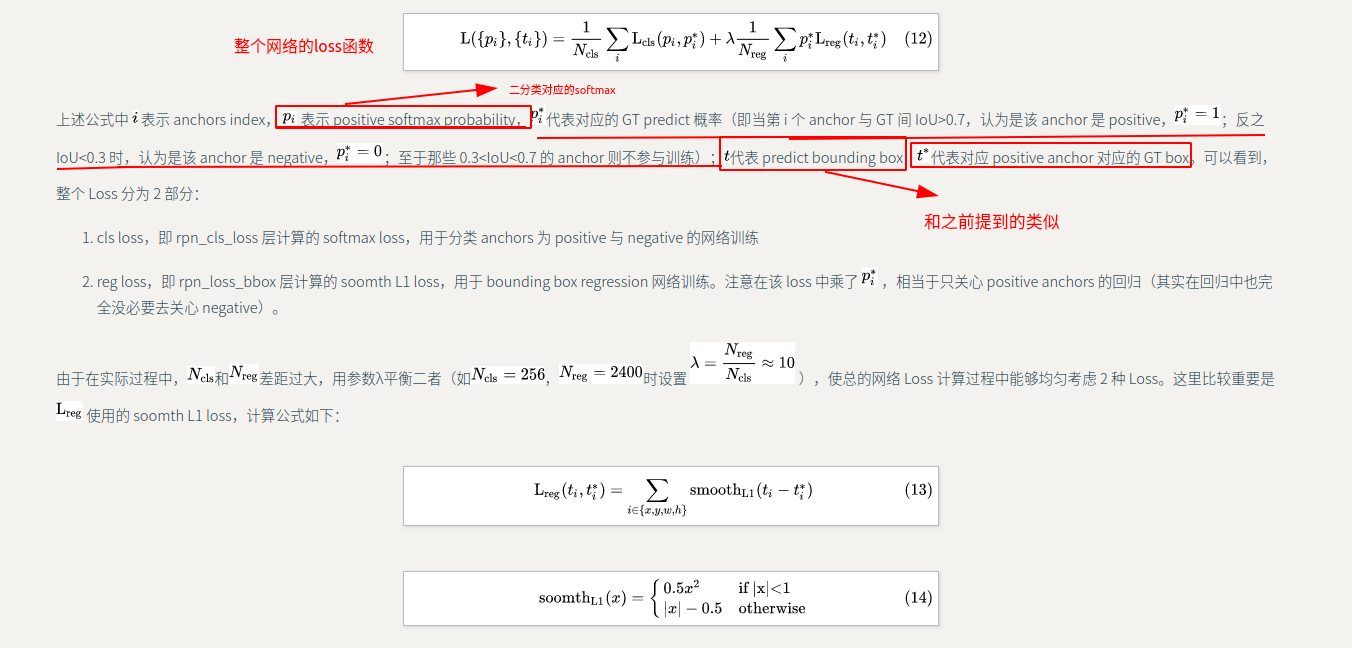
loss函数
在训练过程和bbox回归中都有涉及

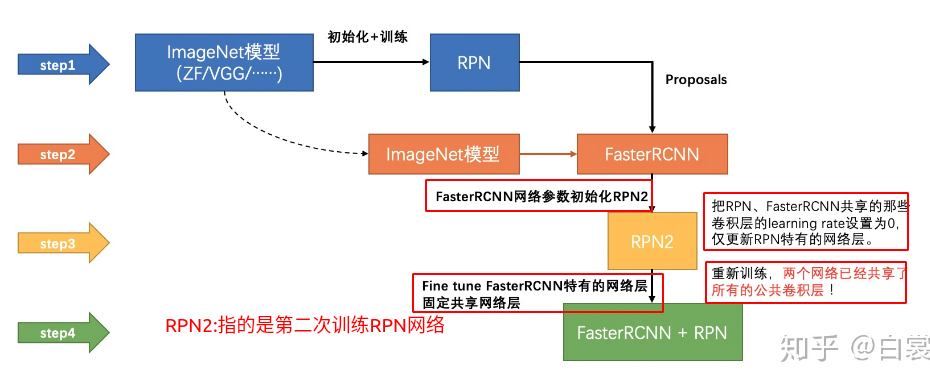
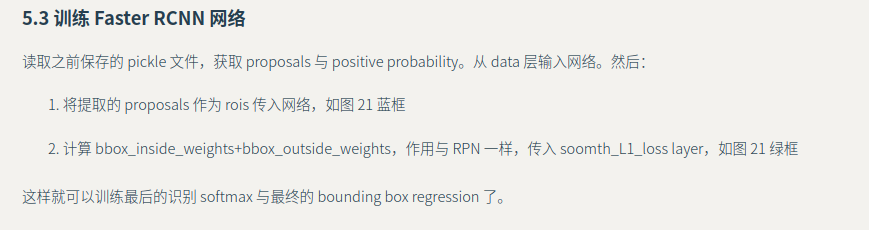
训练过程
交替训练过程
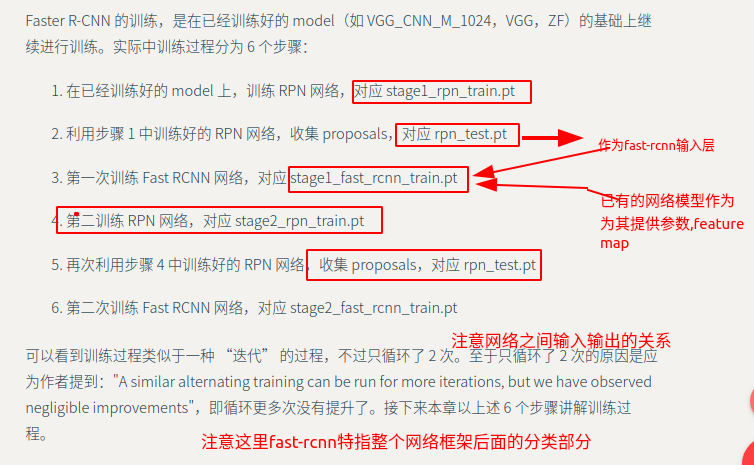
公共卷积层的不是已经训练好了么??
1 | 参数说明: |
rpn-train1

RPN-test

faster rcnn
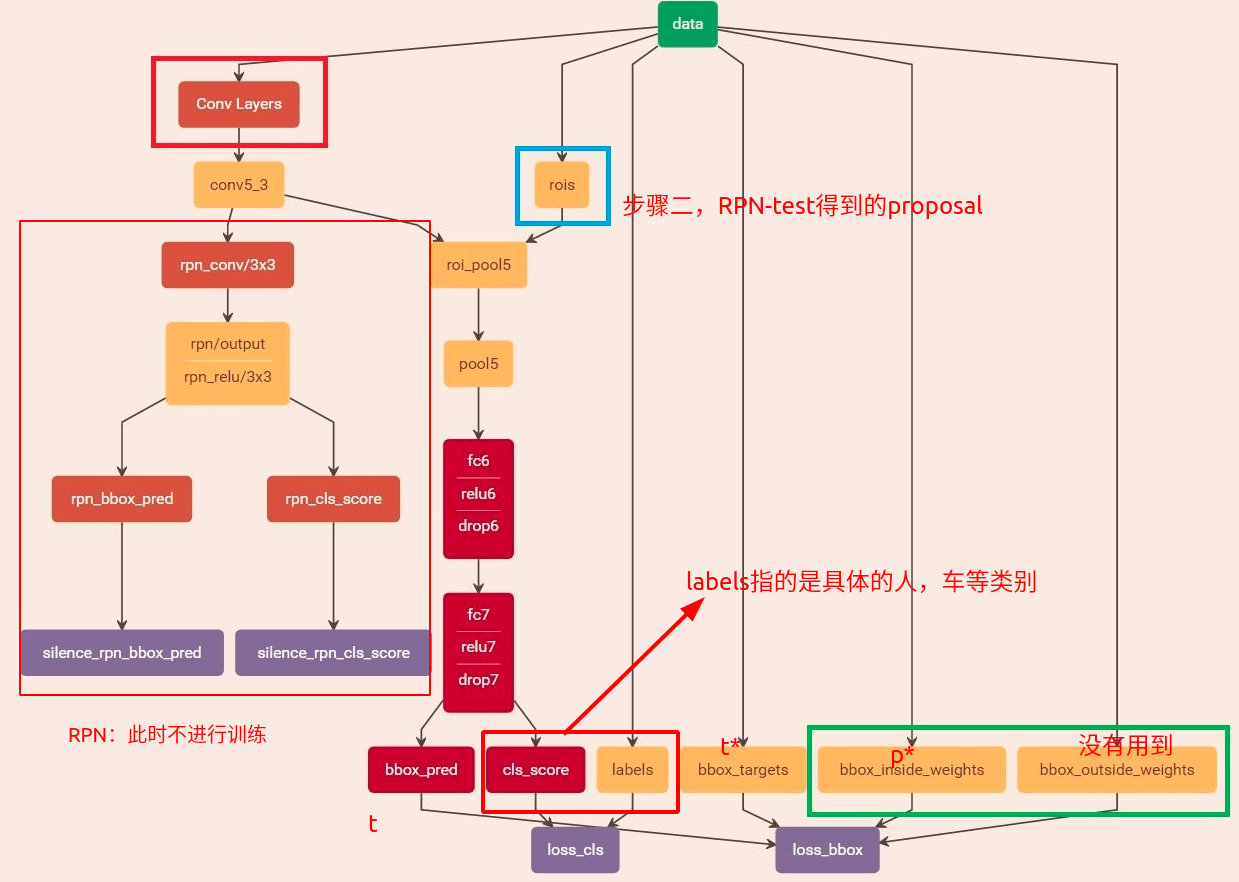
第二轮训练方式与第一轮大同小异。
端到端方式
仍然存在的问题
1。读不懂代码,意味不知道网络需要什么样子的输入以及标注,而且看论文只能看个大概,不是特别清楚得了解每层网络之间的尺寸,维度等等的变换
2.不是特别明白训练的过程
3.不是特别明白 这里关于faster-rcnn 和 rpn 之间的参数共享的问题
- 要训练的参数都有哪些?? 反向传播,参数更新的过程